
OTUS - Motors, drives and encoders
La movimentazione del robot é basata su tre parti fondamentali:
- Motore in continua Topran 108 792
- Encoder 600 impulsi giro
- Azionamento basato su VNH5019
Il motore Topran é il classico motore per tergicristallo auto, ad un costo molto basso offre una elevata coppia ed ha come riduttore una vite senza fine.
Questo permette anche di usarlo come freno in quanto togliendo corrente al motore intrinsecamente la demoltiplica utilizzata non ha il classico comportamento inerziale di un albero libero.
L'unica avvertenza é che occorre, prima dell'uso, modificarlo. In pratica basta aprirlo e rimuovere il collegamento che connette il negativo al contenitore.
L'encoder utilizzato é il classico 600 impulsi giro di produzione orientale, con la quadratura avremo 2400 impulsi giro fondamentali per controllare perfettamente la rotazione delle ruote.
L'encoder é fondamentale sia per il controllo delle distanze e velocitá ma anche per bilanciare l'erogazione della coppia dei motori.
Infatti, essendo questi utilizzati in una modalitá non prevista (PWM), hanno differenti erogazioni di coppia da modello a modello, in questo modo invece si riesce a bilanciarli.
Infine per l'azionamento si usa il ponte a MOSFET WNH5019 della ST, capace di commutare correnti di 30A assolutamente necessari per motori a spazzole.
Sia l'azionamento motore che l'encoder vengono controllati tramite disaccoppiatori ottici, questo é assolutamente necessario visto che questo tipo di controllo é anche un forte generatore di disturbi elettromagnetici.
Il PWM necessario al controllo potenza dei motori viene generato dal sistema embedded ed anche la lettura degli encoder avviene tramite la FPGA integrata sullo stesso.
Il processo che controlla i motori viene eseguito ogni 50 ms quindi i controlli di velocitá e posizionamento sono eseguiti 20 volte al secondo, considerando che la velocitá massima consentita é di 1 m/s l'errore massimo risultante non supera i 50 mm.
Il processo che controlla i motori viene eseguito ogni 50 ms quindi i controlli di velocitá e posizionamento sono eseguiti 20 volte al secondo, considerando che la velocitá massima consentita é di 1 m/s l'errore massimo risultante non supera i 50 mm.
The movement of the robot is based on three fundamental parts:
- Topran 108 792 DC motor
- Encoder 600 pulses per revolution
- Drive based on VNH5019
The Topran motor is the classic motor for car windshield wipers, at a very low cost it offers a high torque and has a worm screw as a reducer.
This also allows it to be used as a brake as by intrinsically removing the current from the motor, the gear ratio used does not have the classic inertial behavior of a free shaft.
The only warning is that it must be modified before use. In practice, just open it and remove the connection that connects the negative to the container.
The encoder used is the classic 600 revolution impulses of oriental production, with the quadrature we will have 2400 fundamental revolution impulses to perfectly control the rotation of the wheels.
The encoder is essential both for controlling distances and speeds but also for balancing the torque output of the motors.
In fact, since these are used in an unforeseen mode (PWM), they have different torque outputs from model to model, in this way instead it is possible to balance them.
Finally, for the drive we use the ST MOSFET bridge WNH5019, capable of switching currents of 30A absolutely necessary for brush motors.
Both the motor drive and the encoder are controlled by optical decouplers, this is absolutely necessary since this type of control is also a strong generator of electromagnetic disturbances.
The PWM necessary to control the power of the motors is generated by the embedded system and also the reading of the encoders takes place through the FPGA integrated on it.
The process that controls the motors is performed every 50 ms, therefore the speed and positioning checks are performed 20 times per second, considering that the maximum speed allowed is 1 m/s, the maximum resulting error does not exceed 50 mm.
Sotto a sinistra dettaglio della trasmissione del movimento fra asse del motore ed encoder tramite un oring.
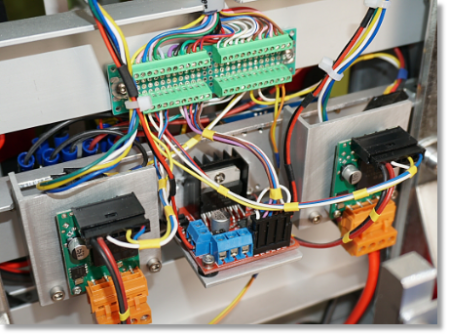
Sotto a destra dettaglio dei driver motori.
Sotto a destra dettaglio dei driver motori.
Below on the left detail of the transmission of movement between the motor axis and the encoder by means of an oring.
Below right detail of the motor drivers.