
astroBot - LX200 compatible telescope controller
A complete system for telescope automation
Difficulty project: 
astroBot is an automation system for telescopes for self-builders who want an automatic aiming system and a refined system for correcting the periodism due to the worm screw.
The whole system is based on two main boards:
- Sharkduino+ Board equipped with a powerful processor for the complete management of the whole system
- Micro Step Driver - Board that manages two stepper motors with the micro-step technique with encoder management and opto-isolated inputs
It is possible to implement the project following two different ways:
The services offered by both do not change, but the necessary commitment and the cost do.
In the BASE version you have the maximum freedom of how to build your own system while in the CONSOLE version you have a small but well-engineered full-stand alone system.
Below we see the two stacked basic boards:
astroBot é un sistema di automazione per telescopi per gli auto-costruttori che desiderino un sistema di puntamento automatico ed un raffinato sistema di correzione del periodismo dovuto alla vite senza fine.
Tutto il sistema su basa su due schede principali:
Tutto il sistema su basa su due schede principali:
- Sharkduino+ Scheda equipaggiata con un potente processore per la completa gestione di tutto il sistema
- Micro Step Driver - Scheda che gestisce due motori passo-passo con la tecnica del micro-passo con gestione encoder ed ingressi opto-isolati
É possibile implementare il progetto seguendo due differenti vie:
Nella versione BASE si ha la massima libertá di come realizzare il proprio sistema mentre nella versione CONSOLE si realizza un piccolo ma ben ingegnerizzato sistema full-stand alone.
Qui sotto vediamo le due schede base impilate: 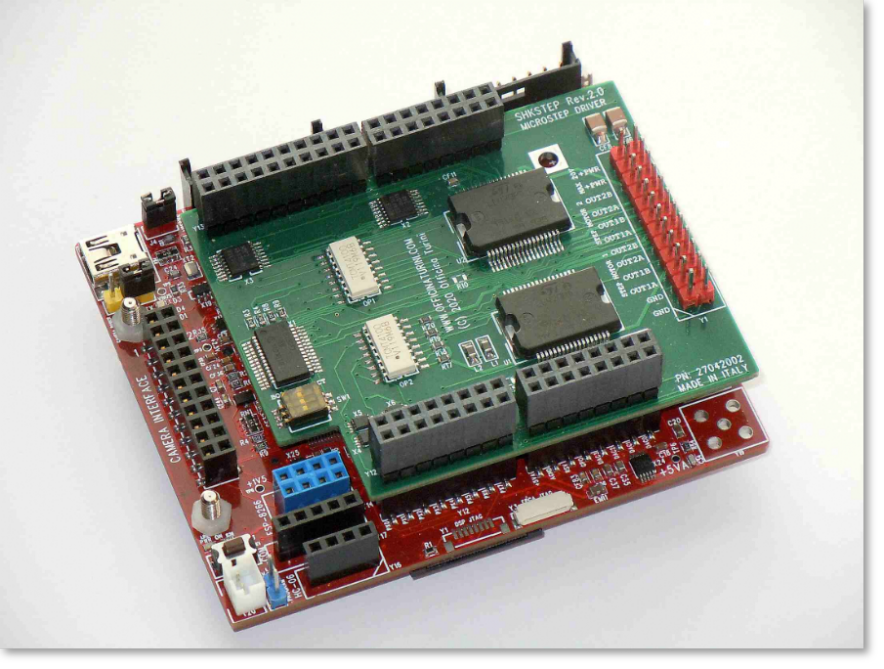
Queste le principali caratteristiche per entranbe le versioni:
- Gestione di due motori passo-passo con corrente massima di 3A rms a 20V max
- Gestione motori con micro passo fino a 1/128
- Posizionamenti automatici con rampe di accelerazione e decelerazione.
- Ingresso opto-isolato per auto guida o joystick per movimenti manuali.
- Gestione di un encoder incrementale per la correzione automatica del periodismo generato dalla vite senza fine.
- LX200 compatibile
Come si configura astroBot? Scrivendo un file di testo! E successivamente caricato sulla SD di sistema.
Questa operazione va realizzata almeno uno volta, al bootstrap astroBot legge la SD e va a cercare nella directory SYS il file CONFIG.DAT questo viene caricato in memoria e salvato nella EEPROM di sistema.
Ad ogni riavvio questo file viene sempre cercato, se non trovato viene utilizzata l'ultima configurazione valida presente in EEPROM.
Ecco un esempio di configurazione:
These are the main features for both versions:
- Management of two stepper motors with a maximum current of 3A rms at 20V max
- Motor management with micro step up to 1/128
- Automatic positioning with acceleration and deceleration ramps.
- Opto-isolated input for self-driving or joystick for manual movements.
- Management of an incremental encoder for automatic correction of the periodism generated by the worm.
- LX200 compatible
How do you configure astroBot? Writing a text file! And subsequently uploaded to the system SD.
This operation must be performed at least once, at bootstrap astroBot reads the SD and looks for the CONFIG.DAT file in the SYS directory, this is loaded into memory and saved in the system EEPROM.
At each restart this file is always searched, if not found, the last valid configuration present in the EEPROM is used.
Here is a configuration example:
# astroBot configuration
# Please refer to the manual for an accurate settings
# Rev. 1.0.0 - 2021 June 23
#
# Telescope mount settings
RA.GEAR.PRIMARY 156
RA.GEAR.SECONDARY 4
RA.DEAD.PULSE 0
DE.GEAR.PRIMARY 156
DE.GEAR.SECONDARY 4
DE.DEAD.PULSE 0
#
# 1 = Invert rotation, 0 = Don't invert
# This setting is correct when during the stellar tracking the telescope moves counterclockwise (to the northern hemisphere)
RA.INVERT 0
DE.INVERT 0
#
# Step motor settings *********************************************************
#
# Step value, from 0 to 7. 0 for full step, 7 for 1/128 of step.
# 0 = 200 s/r
# 1 = 400 s/r
# 2 = 800 s/r
# 3 = 1600 s/r
# 4 = 3200 s/r
# 5 = 6400 s/r
# 6 = 12800 s/r
# 7 = 25600 s/r
RA.STEP.MODE 7
DE.STEP.MODE 7
#
# Phase current
# 0 375 mA
# 1 750 mA
# 2 1125 mA
# 3 1500 mA
# 4 1875 mA
# 5 2250 mA
# 6 2625 mA
# 7 3000 mA
# 8 3375 mA
# 9 3750 mA
# 10 4125 mA
# 11 4500 mA
# 12 4875 mA
# 13 5250 mA
# 14 5625 mA
# 15 6000 mA
RA.CURRENT 7
DE.CURRENT 7
#
# Stall current threshold, range 0 to 127. Bit resolution is 31.25mA
RA.STALL 127
DE.STALL 127
#
# Maximum positioning speed as steps x seconds
RA.MAX.SPEED 1000
DE.MAX.SPEED 1000
#
# Minimum positioning speed as steps x seconds
RA.MIN.SPEED 100
DE.MIN.SPEED 100
#
# Speed threshold to full-step switch
RA.FULL.STEP 1000
DE.FULL.STEP 1000
#
# Acceleration rate as steps per second per second.
RA.ACCEL 10000
DE.ACCEL 10000
#
# Deceleration rate as steps per second per second.
RA.DECEL 10000
DE.DECEL 10000
#
# 1 = Optimize low speed, 0 = Don't optimize
RA.OPTIMIZE 1
DE.OPTIMIZE 1
#
#
RA.JOY.MULTIPLIER 10
DE.JOY.MULTIPLIER 10
#
# Periodic error correction
RA.ENCODER 5000
# 1 = Enable PEC
RA.PEC 1
RA.PEC 1
#
#
# Geographical coordinates
LATITUDE.DEGREE 43
LATITUDE.MINUTE 40
LATITUDE.SECOND 44
#
LONGITUDE.DEGREE 10
LONGITUDE.MINUTE 29
LONGITUDE.SECOND 57
# East is negative
TIMEZONE -1
# 0 = No
LEGALTIME 1
Una volta che il sistema é stato inizializzato astroBot genera la frequenza di tracking in RA in accordo ad i parametri specificati, dopo di che viene eseguito il controllo in tempo reale del movimento di tracking.
Richieste di micro correzioni, sui rispettivi ingressi, o richieste di comandi seriali (LX200) saranno subito eseguiti.
Questa é una documentazione preliminare, seguiranno ulteriori informazioni e tutti i sorgenti di sistema ....
Once the system has been initialized astroBot generates the tracking frequency in RA according to the specified parameters, after which the real-time control of the tracking movement is performed.
Requests for micro corrections, on the respective inputs, or requests for serial commands (LX200) will be immediately executed.
This is a preliminary documentation, more information and all system sources will follow ....