
OTUS - Interface
Per OTUS é stata creata una opposita scheda di interfaccia.
Molte erano le periferiche da collegare e molte le nuove funzioni non disponibili sulla piattaforma SharkDuino da implementare.
Dovendo occupare, solo per i connettori richiesti, una grande superficie si é scelto di creare una scheda che si ponesse in modo ortogonale rispetto alla scheda madre, questa soluzione si é rivelata ottimale anche per l'intrinseca geometria del robot.
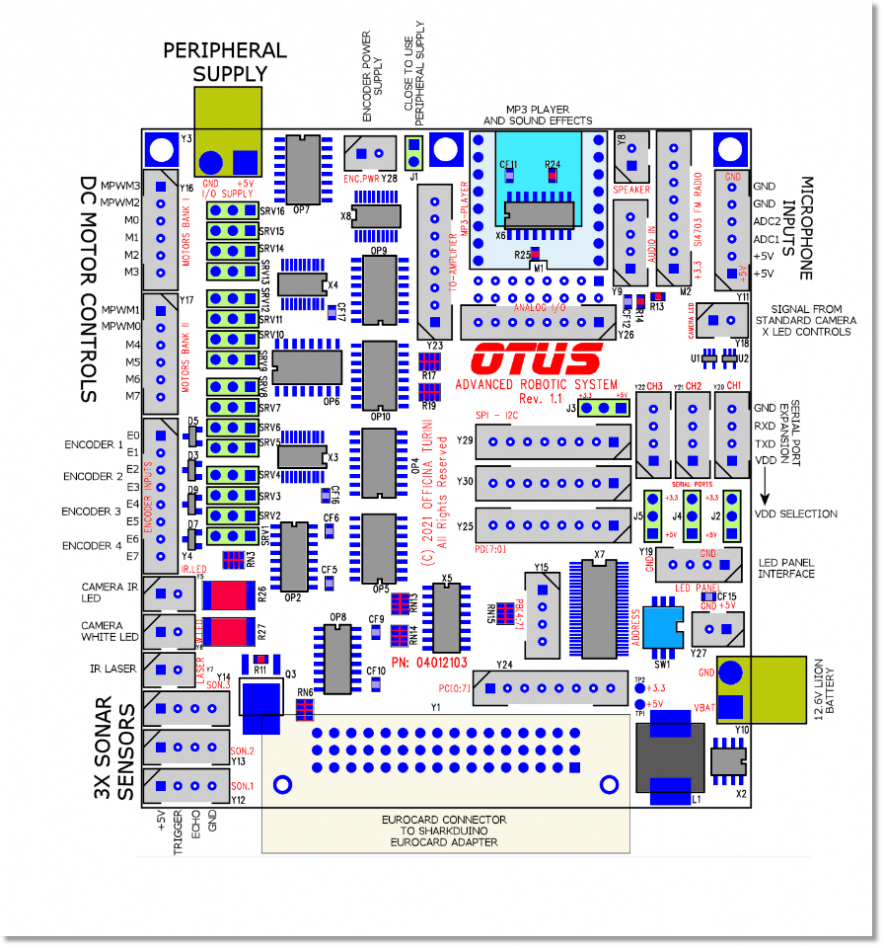
La scheda creata é di 90 x 100 mm ed é una quattro strati.
Qui sotto possiamo vedere la disposizione dei connettori:
An opposite interface card was created for OTUS.
There were many peripherals to be connected and many new functions not available on the SharkDuino platform to be implemented.
Having to occupy, only for the required connectors, a large surface, it was decided to create a card that would be placed orthogonally with respect to the motherboard, this solution proved to be optimal also for the intrinsic geometry of the robot.
In order to use the card we are going to reveal, the Eurocard adapter was used.
The card created is 90 x 100 mm and is a four-layer.
Below we can see the arrangement of the connectors:
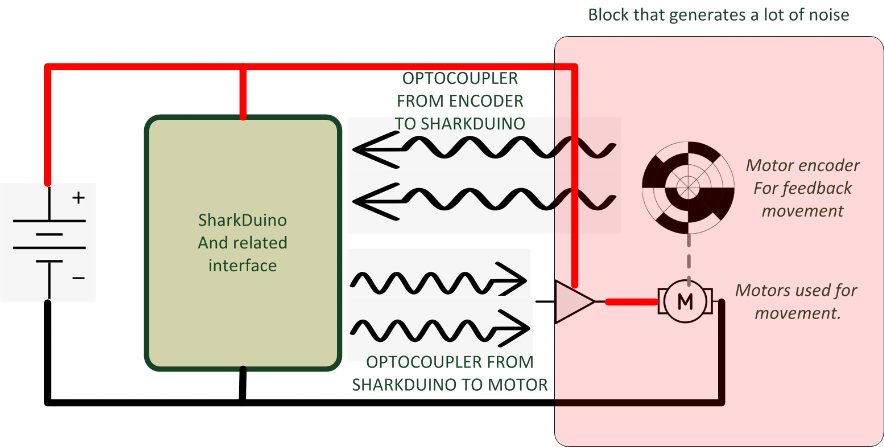
Qui sotto trovate il link allo schema elettrico e come vedrete si é fatto largo uso di accoppiatori ottici, questa scelta é stata imposta da diversi test effettuati.
In pratica nel nostro robot abbiama la parte motori, azionamento ed encoder che sono una sorgente di rumore molto forte, percui questa é risultata la scelta migliore.
Del resto stiamo utilizzando un motore a spazzole pilotato con un pwm e retroazionato da encoder ... senza dimenticare che il modello si sviluppa su una lunghezza di un metro.
Anche i servo motori si sono rivelati grandi generatori di rumore (altro motore a spazzole ...) e si é dovuto combattere non poco con cavi schermati e ferriti per ridurre le emisssioni che andavano ad inficiare il funzionamento degli apparati multimediali (radio, microfoni, etc.)
Tutto il resto é convenzionale e non merita particolari commenti ...
Anche i servo motori si sono rivelati grandi generatori di rumore (altro motore a spazzole ...) e si é dovuto combattere non poco con cavi schermati e ferriti per ridurre le emisssioni che andavano ad inficiare il funzionamento degli apparati multimediali (radio, microfoni, etc.)
Tutto il resto é convenzionale e non merita particolari commenti ...
Below you will find the link to the schematic and as you will see extensive use of optical couplers has been made, this choice has been imposed by several tests carried out.
In practice, our robot has the motors, drive and encoder parts which are a very strong source of noise, so this was the best choice.
After all, we are using a brush motor driven by a pwm and with feedback from an encoder ... without forgetting that the model is developed over a length of one meter.
Even the servo motors turned out to be great generators of noise (another brush motor ...) and we had to fight a lot with shielded and ferrite cables to reduce the emissions that were going to affect the functioning of multimedia devices (radios, microphones, etc.)
Everything else is conventional and deserves no particular comments ...